VenousPro awarded
"VenousPro
operates by imaging and mapping in real time the 3D spatial coordinates
of peripheral forearm veins to robotically direct a needle into the
designated vein. To develop an advanced prototype for initial human
testing, we needed to address three main challenges. First, our device
needed to be safe, which meant we needed repeatability and deterministic
execution. Second, the device had to be highly portable to work in a
plethora of clinical environments. Finally, the system had to meet the
rigor of FDA evaluation. Before selecting NI technology, we considered
several different programming environments and hardware interfaces.
As the complexity of our design and the size of our engineering team
increased, we realized we needed a reliable integrated development
platform. We applied for, and received, support from the NI Medical
Device Innovation Grant, which provided us with custom NI hardware
solutions, LabVIEW, and the NI Training and Certification Program. We built our second-generation prototype using CompactRIO for a rugged, embedded, high-performance platform to control the robotic device. We converted our The MathWorks, Inc. MATLAB®
code into LabVIEW, and developed an intuitive user interface. We
thought the process would take three months, but it only took three
weeks because of the flexibility and modular design of the LabVIEW
environment. As a result, we completed our prehuman in vitro
proof-of-concept testing ahead of schedule.
The core of the device (Figure 2) comprises five I/O modules on the NI cRIO-9025 real-time controllers, including four NI 9514 C Series modules that direct a four DoF miniature robotic arm and one NI 9401
C Series digital I/O module that provides eight channels of
bidirectional communication. Also central to the CompactRIO system are
three linear stages that connect to the RS232 port to provide XYZ
positioning, two GigE Vision cameras with enhanced near infrared
sensitivity that connect through an Ethernet hub, and one handheld
ultrasound probe that connects a USB. We built the “brains” of the
VenousPro from the extensive library of mathematics, robotics, and
machine vision tools available in LabVIEW. We used a queued state
machine architecture to deterministically control the sensors/effectors
on the CompactRIO controller, as well as the user interface (Figure 3) on the host machine.
During real-time execution, images are acquired from the GigE Vision
cameras and the ultrasound probe. The processing pipeline employs
advanced algorithms from the NI Vision Development Module and the 3D
position and velocity information extracted from the images is
communicated to the CompactRIO motion control modules at 20 frames per
second. The CompactRIO system then directs the robotic needle
manipulator. The device uses kinematics, PID, and path planning VIs in
the NI LabVIEW Robotics Module
for functions such as correlating joint angles in the robotic arm with
the 3D Cartesian coordinates of the needle tip. It also uses the NI LabVIEW Control Design and Simulation Module
to predict future positions based on current velocity profiles through a
Kalman filter. Complex mathematical operations on large arrays are
accelerated using the NI LabVIEW Multicore Analysis and Sparse Matrix Toolkit."
"Alvin Chen is a co-founder and the lead engineer of VascuLogic,
where he has helped to develop the first three prototypes of the
VenousPro(TM) automated venipuncture device. In addition to working at
VascuLogic, Mr. Chen is also a National Institutes of Health Graduate
Research Fellow at Rutgers University, where he will receive his Ph.D.
degree in Biomedical Engineering. Mr. Chen’s background is in computer
vision, machine learning, and medical robotics. VascuLogic, LLC is an
early stage medical device company based in New Jersey, U.S.A. Its
mission is to develop and commercialize image-guided medical
technologies that significantly improve the accuracy and safety of
venous access"

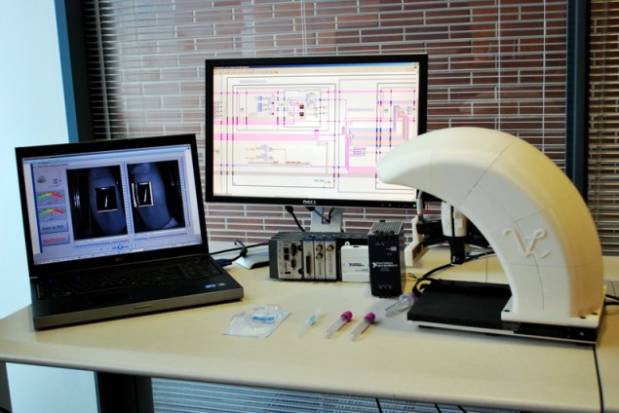
The VenousPro system driven with CompactRIO hardware and LabVIEW software.

The LabVIEW front panel graphical user interface.


"


Comments