"The medical robotics research team from
University of Malaga is comprised of professors of the
Department of System and Automatic Engineering and the first Chair of Surgery. Since 1998, the members of this Engineering Group have been working in the fields of robotics and telemanipulation participating
and conducting numerous research projects. At the same time, the
researchers of the first Chair of Surgery have been pioneers in Spain in
the field of laparoscopic surgery.
The Medical Robotics research team is aimed at developing
robotic assistants for laparoscopic surgery. The purpose is defined as
the creation of machines which are not intended to replace the doctor in
surgical interventions, but to work side-by-side with him. The working
method is focus on an early stage of new knowledge creation and a second
stage leading to the construction of demonstrator systems. The
developed prototypes exhibit a dual function: they are useful to
experimentally verify the theoretical developments; and they facilitate
the transmission of research data.
These lines of
research lead to a series of abilities acquired by the Medical Robotics
research team from University of Malaga. The classification of these
abilities as well as the level acquired by the team for each project,
have been built by taking into account the Robotics 2020 Multi-Annual Roadmap for Robotics in Europe document
written by the SPARC Partnership for Robotics in Europe. Medical
Robotics research team continues developing and improving the level of
such abilities regarding to its activity on the research projects it is
currently involved."
Key projects involve:
Design of Surgical Robots
 |
ISA (Intelligent Surgery Assistant)
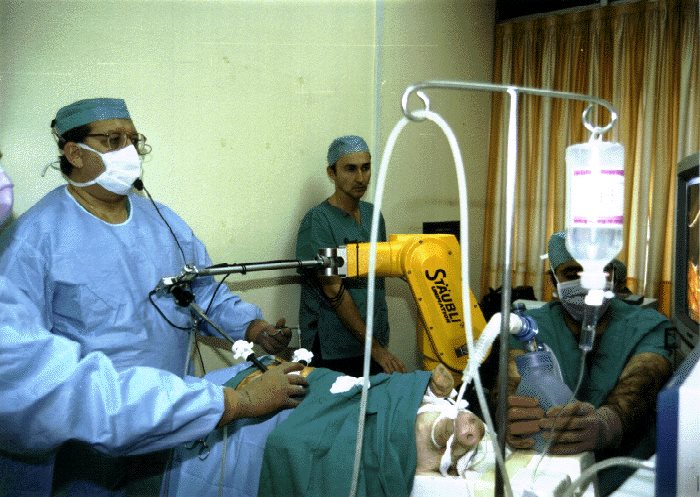
It
is the first robotic assistant designed to be used in laparoscopic
surgery; it is based on an industrial Stäubli RX60 robot. The robot must
fulfil various requirements, such as accessing the entire working area
by means of an endoscope without limiting the surgeon’s movements. The
assistant is handled in response to the surgeon’s commands. In the left
picture, it can be appreciated a clinical trial using animals for
experimentation purposes. It was developed under the project framework
FIS-00/0050-02. |
 |
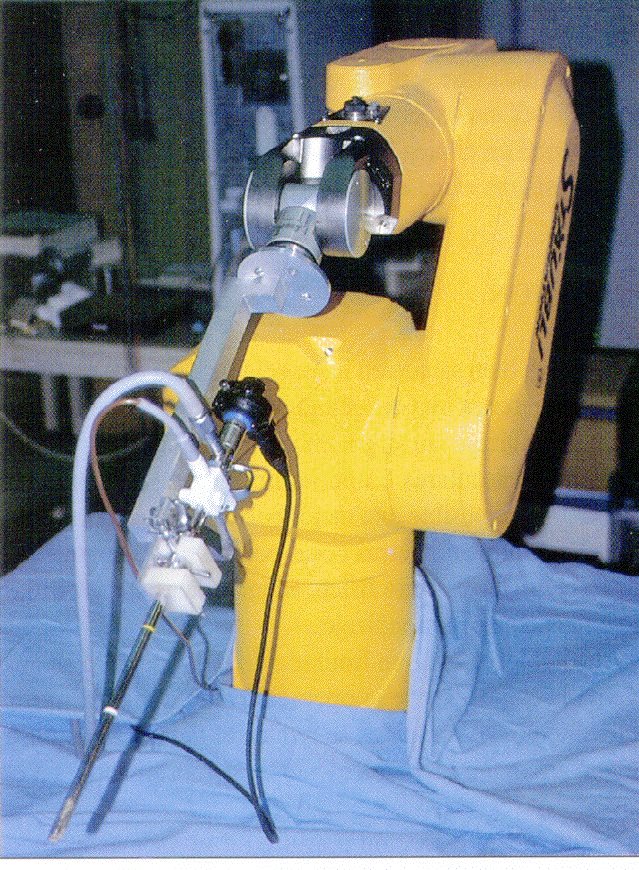
ERM (Edoscope Robotics Manipulator)
Robotic
assistant developed under the project framework PI021708. It is
designed to fulfil the kinematic requirements used for the ISA
assistant, as well as the real-time needs found in a human operating
room. In this sense, there was emphasis on the fact that the robot used
here does not require any structural modification in the operating room,
and that it does not obstruct the surgeons’ movements. In the left
picture, it is shown the ERM, version 3.0. |
 |
RTUP (Trans-Uretral Resection Prostate)
The
left picture shows the ISA robot adaptation for the transurethral
resection of the prostate. The intervention involves passing a narrow
metal telescope, attached to the robot end effector, through the
patient’s penis until it reaches the prostate. The robot is handled by a
master manipulator. |
 |
CISOBOT
It
consists of a two-arm robot, one to control the laparoscopic camera and
another to help the surgeon operate along the intervention in a
semi-autonomous mode. The objective of the CISOBOT system is to help the
surgeon operate alone. To that end, the system is provided with a
multimodal HMI leading the robot to a higher reaction capacity and a
high level intelligence. This robotic assistant has been developed under
the project frameworks DPI2007-62257 y P07-TEP-02897. |
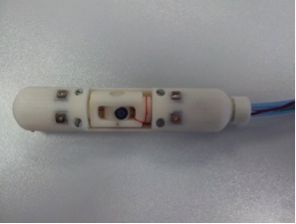 |
Miniatured Robots
We
have designed a set of miniature robots which are introduced into the
abdominal cavity through one of the incisions surgeons perform to
operate. These devices are provided with a magnet for the attachment to
the abdominal wall. Two kinds of robots have been designed: a miniature
camera robot, provided with a high definition camera and an illumination
system, and a lighting-robot, which only incorporates a lighting system
and makes it possible to direct the light source in order to create
shadows in the image. |
Movements Control of the Instruments
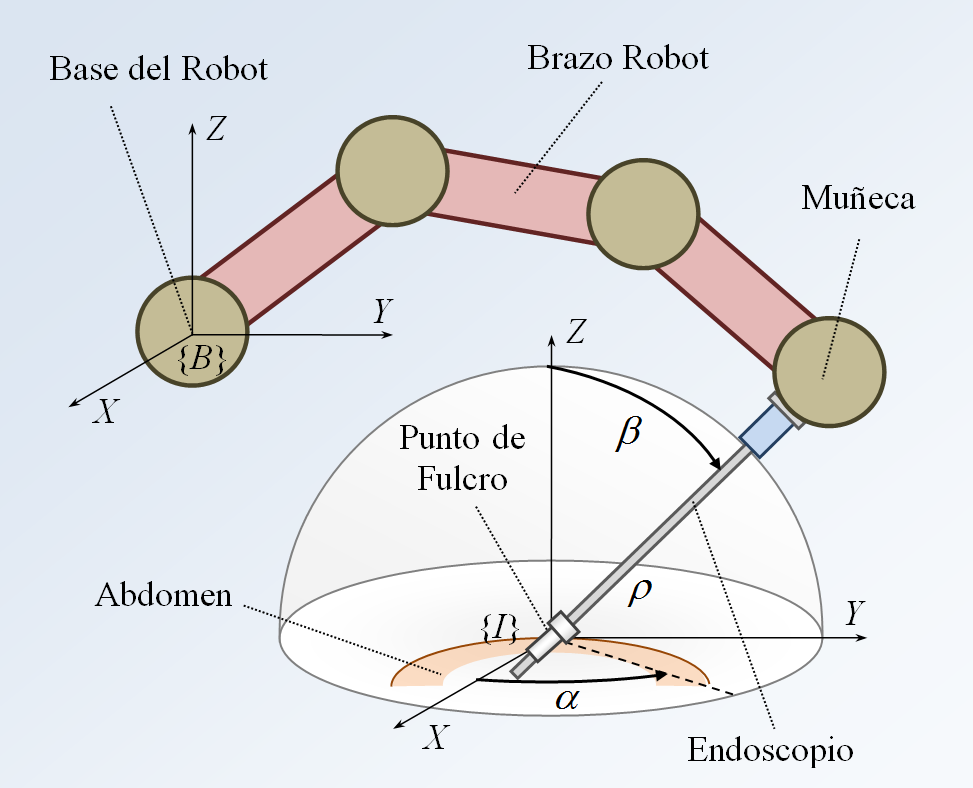 |
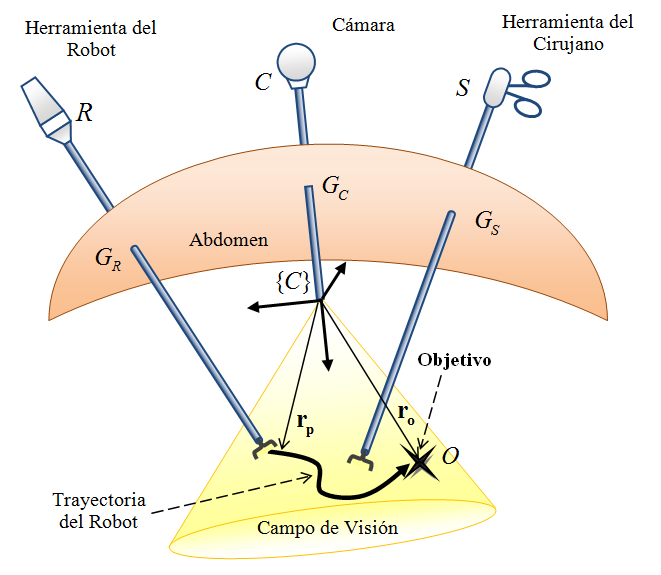
Positioning problems of surgical instruments
The
endoscope is inserted through the abdomen at the so called point of
fulcrum. It consists of positioning the instrument with a steering angle
α, a rising angle β and positioning the camera at a distance ρ of the
fulcrum. These spherical coordinates are defined by a coordinates system
expressed in the point of fulcrum. These aspects are detailed in the
left picture. |
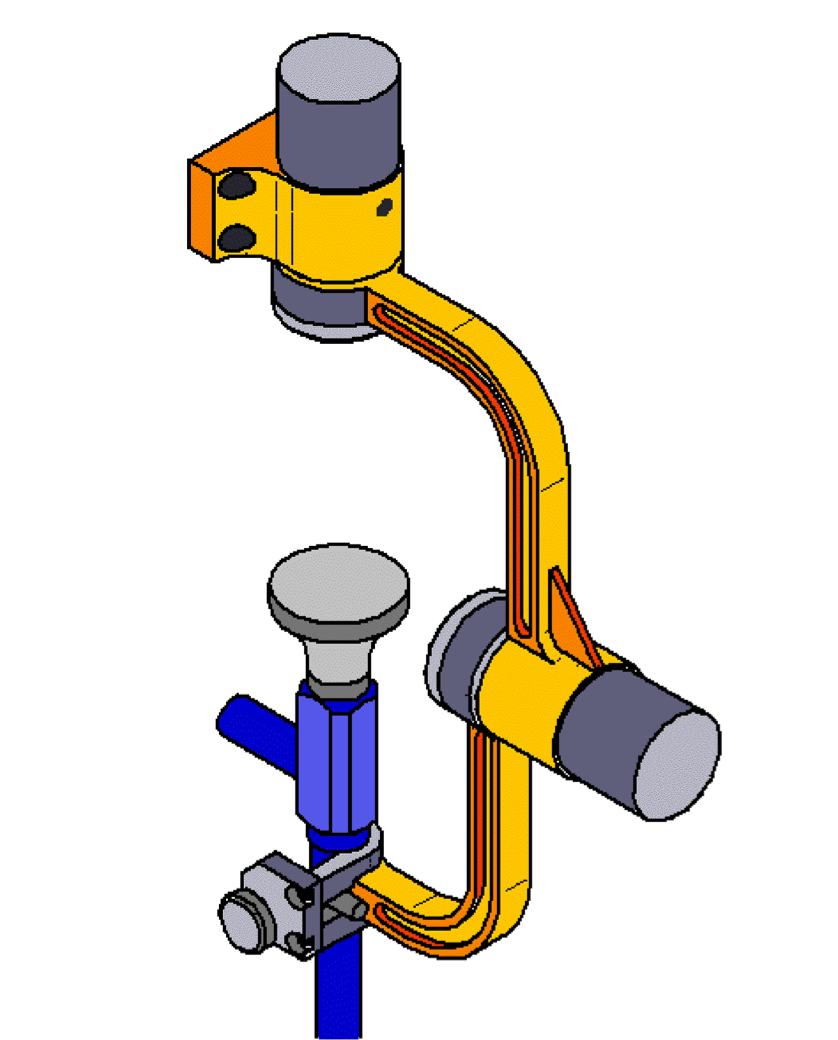 |
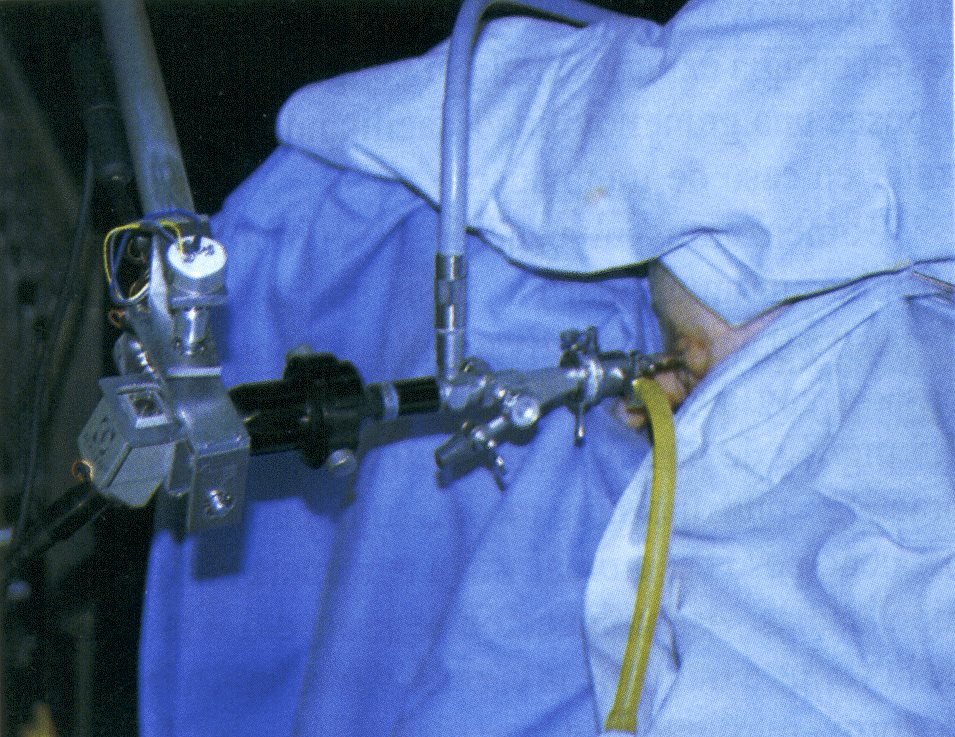
Passive wrist mechanism
It
is a wrist mechanism used in the surgical assistant consisting of two
joints perpendicular to each other (see figure on the left). Thanks to
the joint encoders, α and β-positions can be calculated, however ρ
(defined as the distance from the passive wrist to the fulcrum) is
impossible to be calculated. This latter increases the accuracy in
placing the endoscope. |
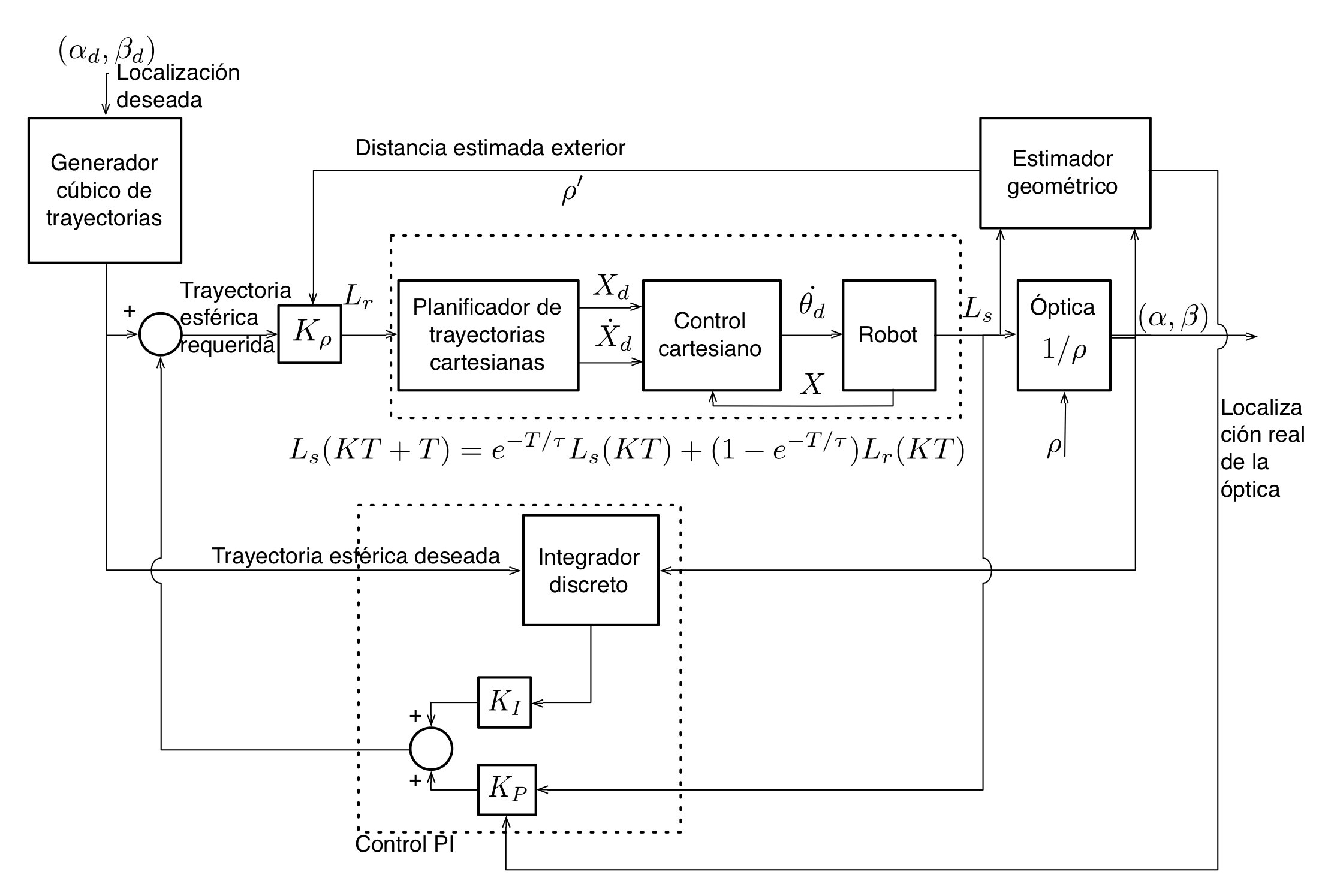 |
Passive wrist control scheme
The
control schemes for surgical tools are based on the estimation of the
distance ρ (from the camera to the point of fulcrum) through geometrical
methods. Likewise, they do not avoid the orientation errors resulting
from the endoscope due to a bad estimation of ρ. The suggested scheme
(see figure on the left) proposes a solution to this. It is based on the
control theory, which does not just estimate ρ, but it also avoids the
orientation errors mentioned above. The controller has two nested loops
with two different functionalities. The inner loop imposes the robot a
specific dynamic behaviour when following a Cartesian trajectory. The
outer loop carries out two actions: it avoids the orientation errors
resulting from the endoscope by means of spherical control, and at the
same time, the geometric estimator calculates the ρ value in order to
reduce minimally the estimation errors. This coupling effect provides
strength and accuracy to the control scheme. This strategy has been
implemented in the ERM robo. |
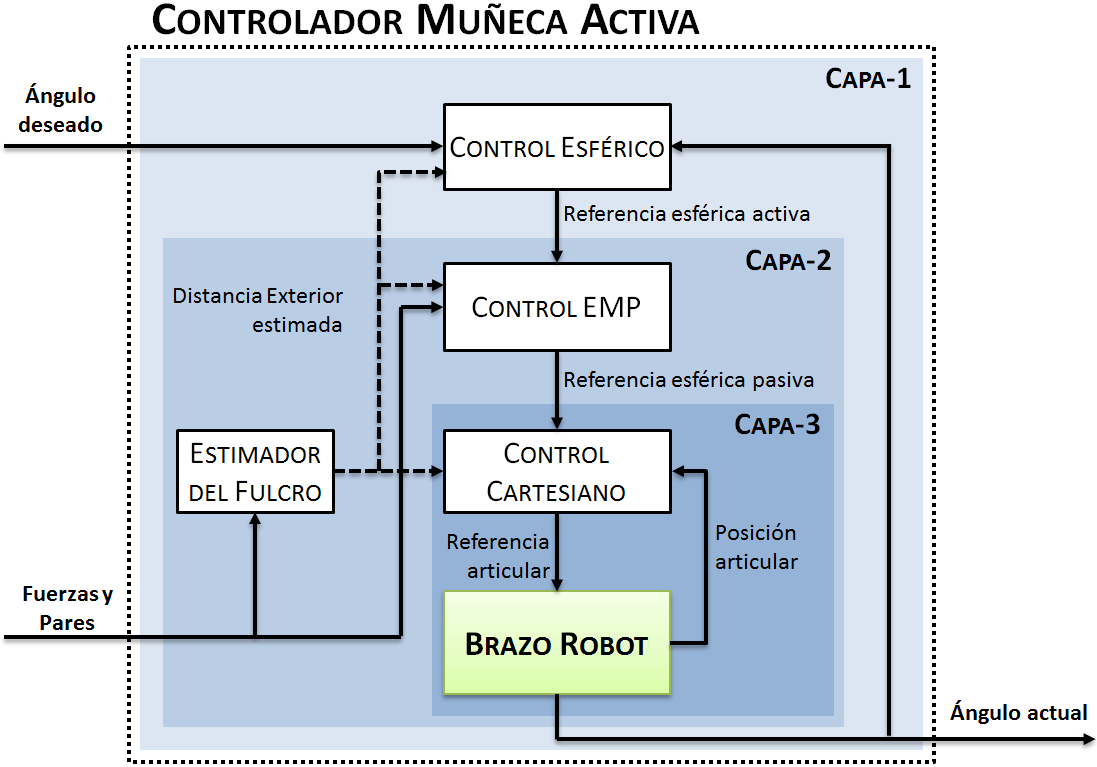 |
Three-Layer Control by Passive Wrist Emulation
Robots
with active wrists can apply undesired forces to the abdominal wall of
the patient if any uncertainty concerning the fulcrum location is
produced. In order to solve this issue, it has been proposed a
methodology that allows the emulation of a passive wrist with an
actuated one. To achieve this, the measure of the force applied to the
abdomen permits the fulcrum estimation in order to control the
endoscope’s orientation. The control scheme, which is divided into three
layers to facilitate the system stability study, consists of an inner
layer based on the Cartesian control for the robot, an intermediate
layer devoted to control the estimated fulcrum position, and an outer
layer devoted to control the spherical positioning of the endoscope. |
Autonomous Planning
(back to top)
 |
Automatic guidance system
It
consists of reaching a position defined by a surgeon’s tool, whereas
the other instrument is considered as an obstacle the robot must avoid.
To that end, the current velocity of the robot and the obstacle tool is
processed through a Fuzzy Logic algorithm for planning the robot’s
trajectory with the combination of three behaviors: the first one is
devoted to find a target trajectory avoiding static obstacles by means
of the artificial potential fields method; the second one is devoted to
correct the robot’s velocity depending on the obstacle motion and the
distance between the two tools; finally, a third behavior is needed to
displace the robot-guided tool in the direction of the obstacle when the
collision is forced by the surgeon. |
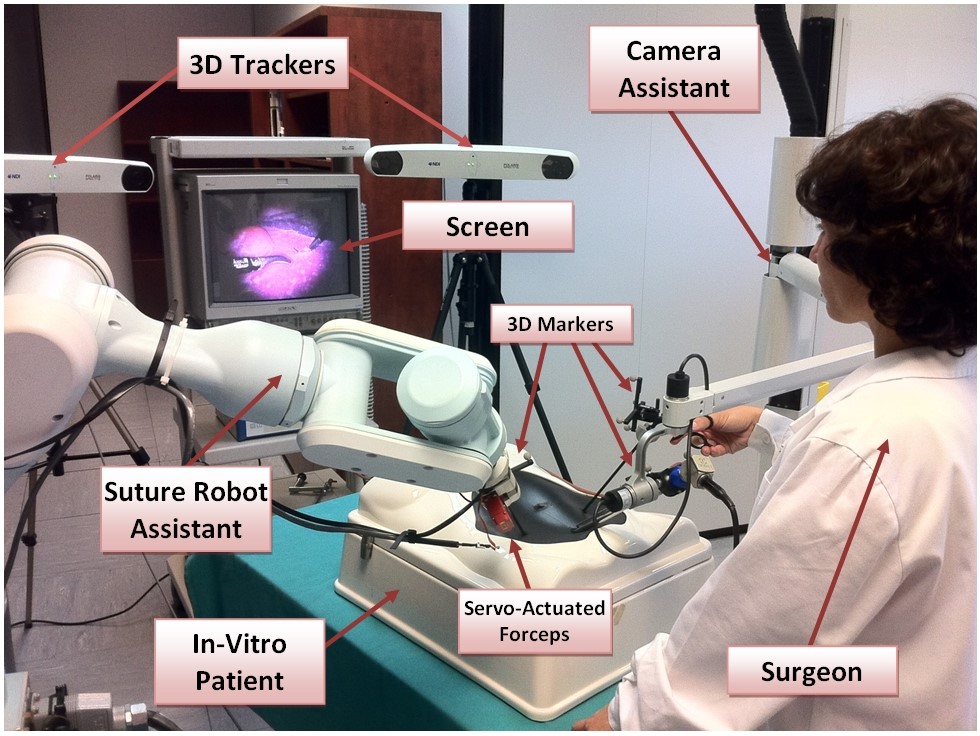 |
Automated systems
The
automated systems are developed to assist certain movements distinctive
of the operations. Specifically, it details the automation of one of
the surgical tools to assist surgeons during a suture procedure. The
total system detects the different movement phases in suture procedures
through a maneouvre recognition system and a computer vision system.
This latter detects the needle position and orientation so that the
robot can collaboratively work with the surgeon. |
Fault Tolerant Control Architectures
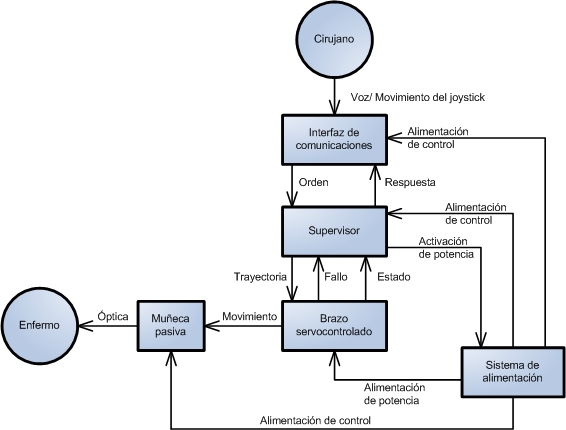 |
Functional architecture
An
essential requirement in medical applications is the guarantee of the
system safety. To achieve this, the first step is to design a system
based on a set of modules which have a specific functionality. A
surveyor process will keep the modules in good working order (centre of
the left figure). If any anomalous situation happens, it will activate
the “failure mode” of the surgical assistant. This technique needs to
study all possible errors appearing in every module, to analyze the way
they may be detected, and to plan to act accordingly. |
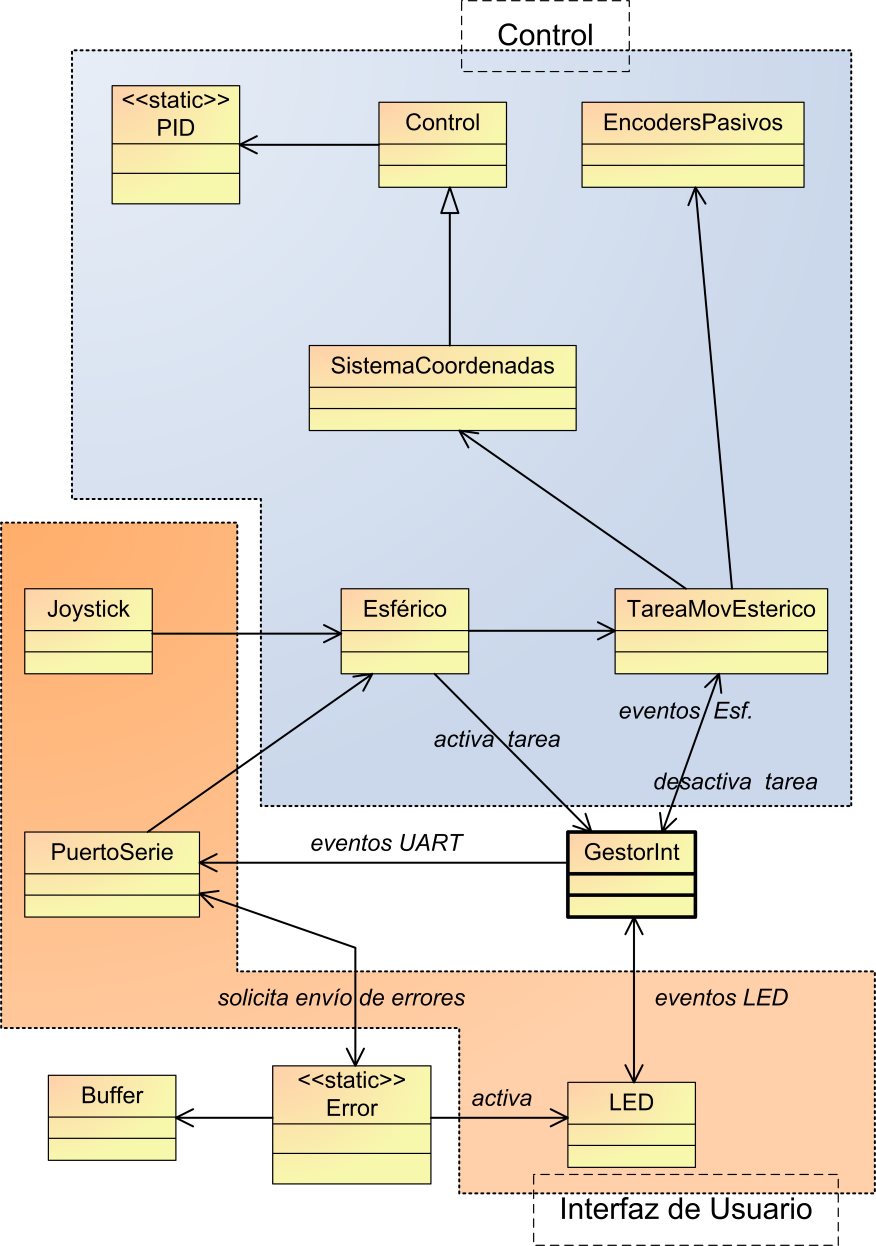 |
UML design
The
surveyor programming of the functional architecture can also be
critical. In order to ensure that the program is free of errors, a
codification is followed with some styles rules. Likewise, a series of
unit tests, functional integration tests and hardware integration tests
are conducted in every UML module. The left figure details the UML
scheme programmed in the surveyor of the functional architecture. |
Human-Machine Interfaces
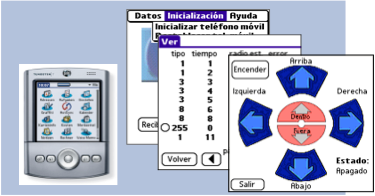 |
PDA-based interface
The
use of a PDA device makes possible a comfortable communication with the
robot assistant. It does not only emit motion commands to the robot
assistant but it can also carry out a series of supervision tasks.
Specifically, it can be used to obtain information from the status of
the robot, motion precision, or to keep a record of all performed
activities. The left figure shows the images of the PDA-based interface. |
 |
Speech command recognition
It
is a system containing DSP-based speech recognition software. In such
system, the coded motion commands can be digitally sent to the robot
assistant. With that, the problem resulting from the interferences of
the analog transmissions-based solutions is solved. Besides, users can
add the voice profile to their cards so the only orders to be recognized
are those coming from the selected profile. In the picture on the left,
it can be appreciated the developed system. |
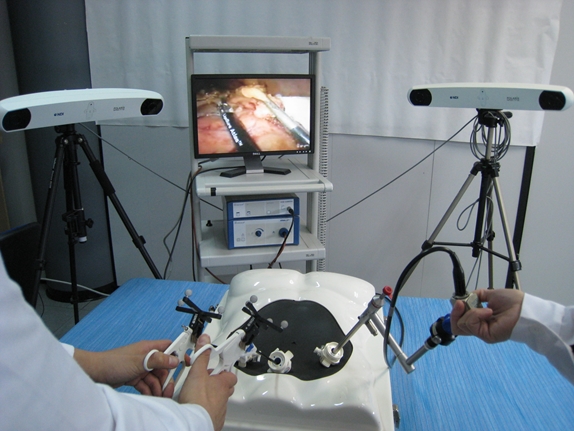 |
Recognition of surgical gestures
The
recognition of the surgeon’s surgical gestures or manoeuvres along the
intervention permits to know the current situation of the surgical
protocol. This provides a more natural and comfortable communication
between the surgeon and / or the robot, and so it is considered as an
alternative way for sending orders or commands. A manoeuvres library and
a manoeuvres recognition system have been constructed in order to
recognize the current surgeon’s manoeuvre. It is achieved by means of a
surgical task modeling in which the Hidden Markov Models have been used.
The recognition system includes a data collection system that informs
about the surgeon’s surgical tools positioning using 3D sensors, and in
this way the tool interactions are achieved. |
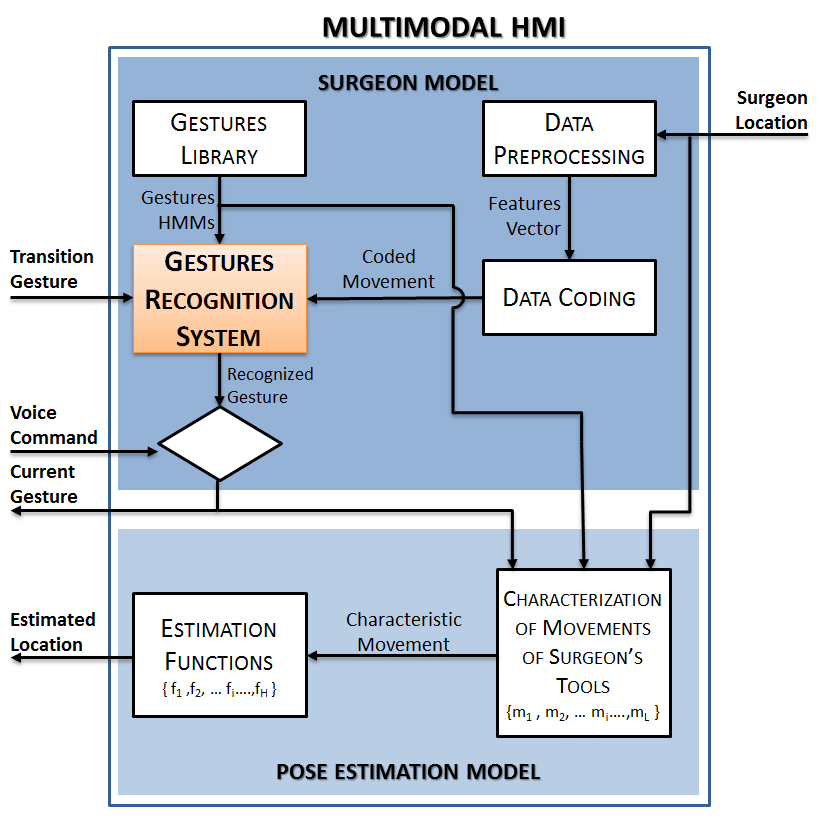 |
Multimodal interface
The
development of a robotic assistant for laparoscopic procedures, which
can semi-autonomously operate working with the surgeon in the management
of the optic and the additional support tool, has provided the
interface design with new challenges. The required interface to control
this kind of robot should not overload the surgeon with many commands
and button bars, reason why it has been developed a system which can
recognize the surgeon’s surgical gestures in order to know the current
intervention phase or the specific surgeon’s commands. The multimodal
interface combines both the gestural and voice commands in such a way
that it is similar to the relationship between the surgeon and the human
assistant. |
Telesurgery

 |
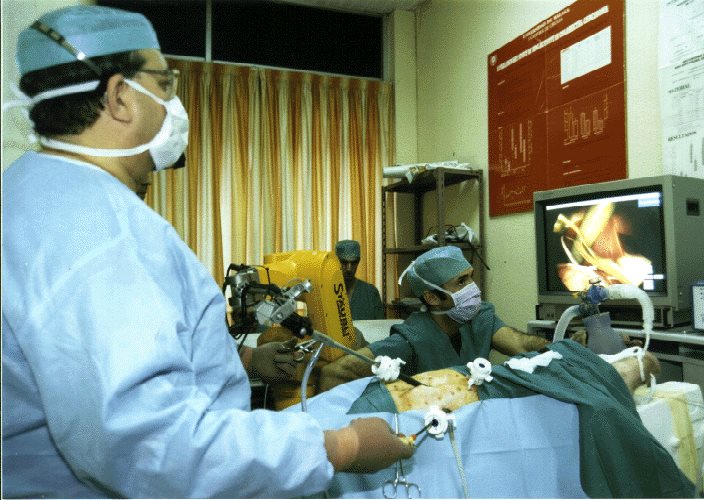
Teleoperation of the ERM assistant
In
the pictures, it is firstly appreciated, on the upside, a group of
surgeons in the operating room during an intervention with an animal for
experimentation purposes, and on the downside, the remote surgeon with
an interface monitor, via which the surgeon can see the image of the
laparoscopic camera, and a space ball with which he can control the
robot. The task of the remote surgeon is to supervise the operation
performed in order to act in three ways: i) to communicate with the
local surgeons via videoconference, ii) to make marks in its monitor so
that local surgeons can see them on theirs, or iii) to take control of
the robot in order to center the camera on a specific area of interest. |

 |
Remote teleoperation of an automated operating room
On
the left pictures, it is appreciated the system configuration. On the
upside, it is shown the remote surgeon with an interface containing a
monitor on which the laparoscopic image is displayed via IP, and two
haptic devices. On the downside, it is appreciated the automated
operating room containing the ERM robotic assistant devoted to handle
the endoscope, and two manipulator robots using each one a tool. This
way, the remote surgeon controls the ERM through the voice, and the
manipulator arms, which are provided with a force sensor, through the
haptic devices. |
 |
Force feedback Control
Teleoperated
surgical robots allow the surgeon a straight control over the actuation
of the manipulators, which provide a higher precision on the movement
of the surgical tools. However, this mechanism avoids the physical
contact between the surgeon and the patient, which leads to a loose of
both tactile and pressure sensations. In order to minimize the effect of
this limitation the group of Medical Robotics at University of Malaga
has developed teleoperated control systems with force feedback which aim
to recover part of that contact sensations for the surgeons. This
control methodology requires to solve some aspects which are inherent to
this kind of systems. For example, the force signal delay sent from the
force sensor attached to the manipulator end effector towards the
haptic device managed by the surgeon, as well as the measure distinction
between the force applied on the insertion point or fulcrum and the
force exerted by the tool tip over the internal patient tissues. |
Clinical Essays
 |
ISA assistant
It
is the first prototype designed to be used in laparoscopic surgery and
based on an industrial manipulator. It was used to study the viability
of the robot assistant for handling the endoscope in this kind of
operations. In-vitro tests were firstly performed to evaluate the
efficacy of robot in laparoscopic camera positioning. It was followed by
the phase of clinical trials with animals for experimentation purposes
in which interventions such as the cholecystectomy, the Nissen
fundoplication, or the removal of part of the colon were evaluated. On
the left, it is appreciated a picture of one of the interventions with
animals. |
 |
Automated Cystoscopy
It
was an adaptation technique of ISA assistant for the examination of the
urinary bladder. The essays were performed with animals for
experimentation purposes, and this time, the cystoscope was inserted
directly into the animal’s urethra. The success of these essays provided
evidence that a same robot can perform more than one task, representing
a cost recovery in a shorter space of time. On the left picture, it is
appreciated one of the essays with animals for experimentation purposes. |
 |
ERM assistant
The
robot was used in human clinical medicine. This system has been tested
with thirty two patients in clinical trials. To achieve this, the robot
was adapted in order to fulfil the demanding requirements concerning the
electro-medicine machines. A clinical protocol for the description of
the study field was also designed. It was concluded that, through this
robot’s use, the amount of time of the operation as well as the
surgeon’s fatigue were significantly reduced. Similarly, another
advantage was that the patient needed less time to recuperate after the
operation. On the left, there is a picture showing one of the operation
moments. |
 |
In-vitro essays for the analysis of surgical manoeuvres
The
in-vitro manoeuvres essays have been carried out taking into account
the study of clinical protocols for acquiring the surgeon’s model,
particularly the cholecystectomy procedure. These in-vitro essays have
enabled the construction of a maneouvre recognition system contained in
the multimodal interface, and the creation of the automatic movements so
that the robot and the surgeon can collaborate in manoeuvres such as
the suture technique. |
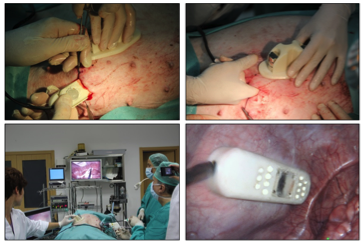 |
Miniatured Robots
We
have performed a clinical trial with a porcine model to test the
viability of using a miniature camera robot in a real environment. The
main objective of this experiment was to analyze both the quality of the
image provided by the camera, and the magnetic interaction through the
abdominal wall.
|
Source: University of Malaga


Comments