Article intro - accuracy of robot-assisted dental surgery
A great technology reference article appeared: Accuracy of dental implant placement using different dynamic navigation and robotic systems: an in vitro study by Zonghe Xu, Lin Zhou, Bin Han1, Shuang Wu, Yanjun Xiao, Sihui Zhang, Jiang Chen, Jianbin Guo & Dong Wu
Abstract
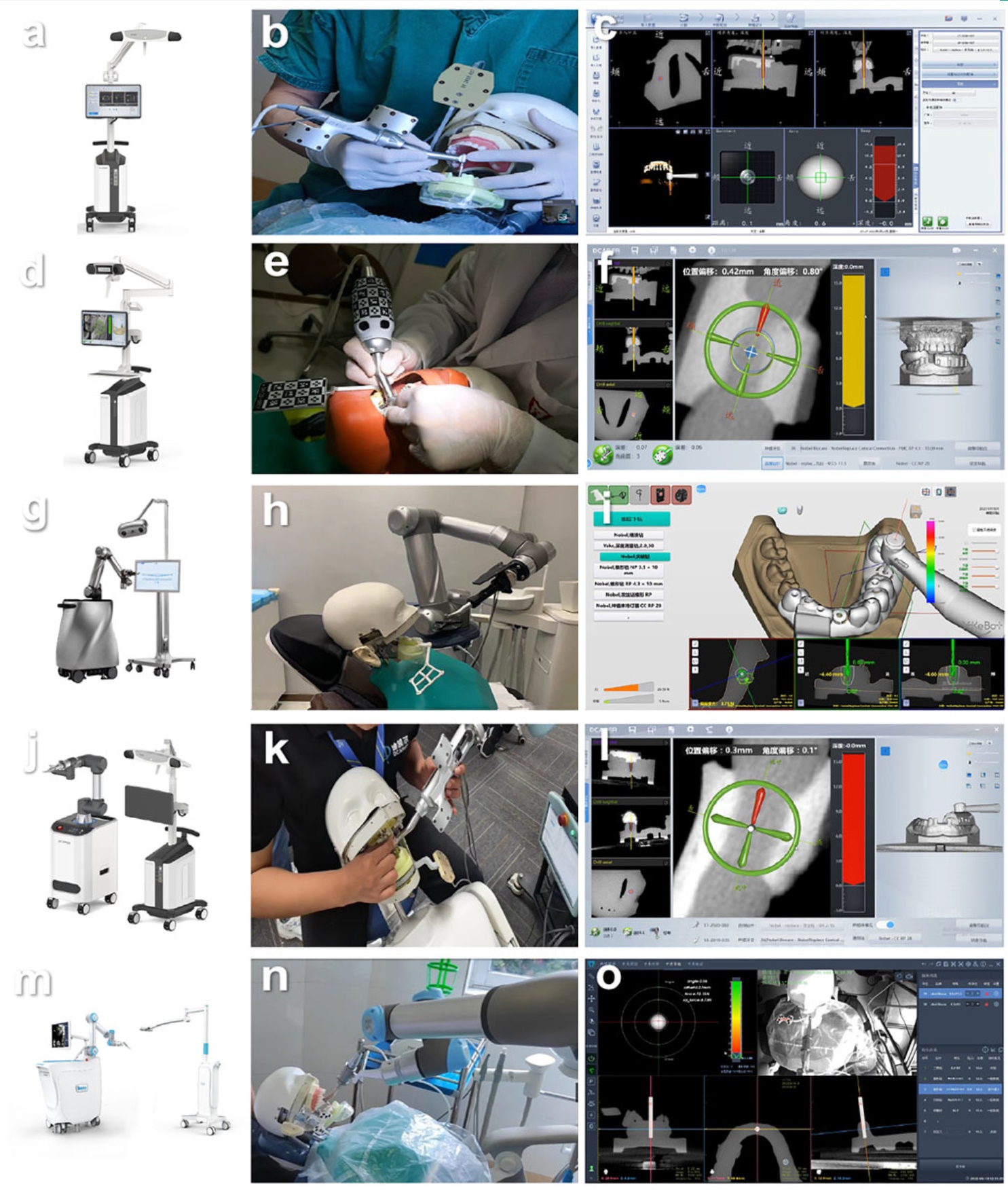
Computer-aided implant surgery has undergone continuous development in recent years. In this study, active and passive systems of dynamic navigation were divided into active dynamic navigation system group and passive dynamic navigation system group (ADG and PDG), respectively. Active, passive and semi-active implant robots were divided into active robot group, passive robot group and semi-active robot group (ARG, PRG and SRG), respectively. Each group placed two implants (FDI tooth positions 31 and 36) in a model 12 times. The accuracy of 216 implants in 108 models were analysed. The coronal deviations of ADG, PDG, ARG, PRG and SRG were 0.85 ± 0.17 mm, 1.05 ± 0.42 mm, 0.29 ± 0.15 mm, 0.40 ± 0.16 mm and 0.33 ± 0.14 mm, respectively. The apical deviations of the five groups were 1.11 ± 0.23 mm, 1.07 ± 0.38 mm, 0.29 ± 0.15 mm, 0.50 ± 0.19 mm and 0.36 ± 0.16 mm, respectively. The axial deviations of the five groups were 1.78 ± 0.73°, 1.99 ± 1.20°, 0.61 ± 0.25°, 1.04 ± 0.37° and 0.42 ± 0.18°, respectively. The coronal, apical and axial deviations of ADG were higher than those of ARG, PRG and SRG (all P < 0.001). Similarly, the coronal, apical and axial deviations of PDG were higher than those of ARG, PRG, and SRG (all P < 0.001). Dynamic and robotic computer-aided implant surgery may show good implant accuracy in vitro. However, the accuracy and stability of implant robots are higher than those of dynamic navigation systems.
Source: Nature


Comments