UNL Applied Mechanisms & Design Lab
University of Nebraska has long been focusing on the development of surgical robots. Most well-known are the in-vivo devices from Oleynikov et al.
MEet some of the great projects form Dr Nelson's Applied Mechanisms & Design Lab:
- "Steerable Natural Orifice Material Delivery System
Natural orifice translumenal endoscopic surgery (NOTES) is a surgical technique that eliminates all external incisions. Surgical robots are inserted through a natural orifice to access the insufflated abdominal cavity. This natural orifice material delivery system will aid miniature in-vivo robots by providing them with materials, tools, light, irrigation and suction, as well as remove excised tissue. The system will also provide surgeons with another video angle of the activities taking place in the abdomen. Ongoing work involves friction reduction, cross section reduction and material grip development.
(With D. Oleynikov - UNMC, S. Farritor - UNL; support from DOD-TATRC) - Automated Conductivity Examination of Biomedical Polymers
Certain biomaterials, when subjected to mechanical forces, may exhibit changes in their electrical conductivity. The electrical conductivity can also vary locally within the specimens. Understanding variation of conductivity due to mechanical stimulations is important for biomaterials of this type in various applications. The objective is to design a robotic or automated system that is able to measure conductivity of polymeric specimens while being placed under mechanical loading.
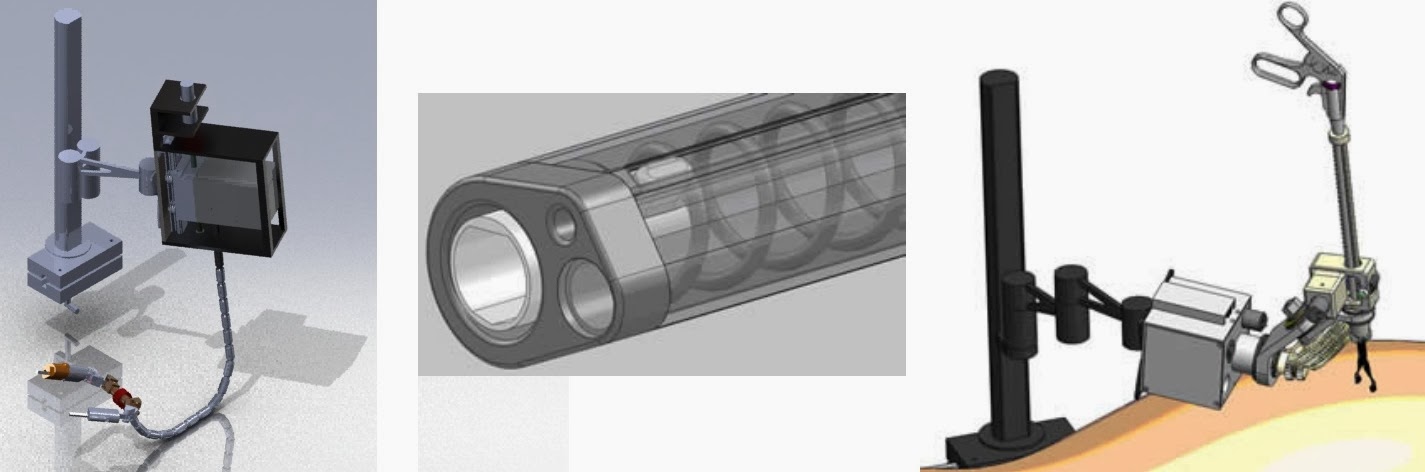
(With Jean-Marc Saiter - Université de Rouen, France) - CoBRASurge – Compact Beveled-geared Robot for Advanced Surgery
The Compact Bevel-geared Robot for Advanced Surgery (CoBRASurge) was created to replace current robot-assisted minimally invasive surgery (MIS) devices which occupy a relatively large amount of space in operating rooms. This novel approach effectively incorporates: three degrees of rotational freedom, one degree of translational freedom, a fixed center of rotation, an optimized kinematic telesurgery workspace, and haptic feedback options. Ongoing work involves increasing gear transmission accuracy, improvements to the driving assembly for the translational DOF, decreased volume and weight, and a new mounting system between the robot and surgery table. Multi-robot cooperation is also being investigated.
(With D. Oleynikov - UNMC)"


Comments