Skip to main content
Search
Search This Blog
SurgRob
Robotics is here to stay. Better be friends…
Posts
Showing posts from October, 2011
Show all
October 31, 2011
B.E.S.T. Innovation in MIS course from IRCAD
October 26, 2011
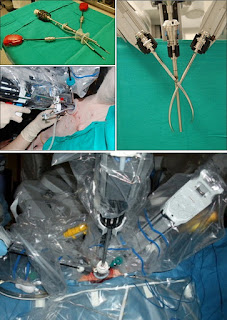
Da Vinci for SILS
October 20, 2011
CIS news
October 16, 2011
8th IFAC Symposium on Biological and Medical Systems
October 12, 2011
MICCAI in Toronto
October 06, 2011
Visiting Intuitive
October 02, 2011
CIS news
Newer Posts
Older Posts
Home